배양한 골격근에 기계를 조합한 이족보행 로봇이 일본에서 개발됐다. 생체 조직과 기계를 결합한 바이오 하이브리드 로봇은 전부터 구상됐지만 실제 등장한 것은 이번이 처음이다.
도쿄대학교와 와세다대학교는 지난달 27일 공개한 실험 보고서에서 생체 조직과 인공 구조물을 조합해 만든 근육과 이를 이용해 이족보행하는 로봇을 공개했다.
두 대학 공동 연구팀은 골격근을 배양하고 기계와 조합한 인공 근육을 수년 전부터 구상했다. 생체 조직과 기계를 결합한 바이오 하이브리드 로봇 개발은 100% 기계로 구성된 로봇에 비해 가동이 부드럽고 자연스럽다. 인간이 몸을 움직이는 메커니즘을 잘 보여주는 모델이라는 점에서 관절 질병의 치료에 응용할 수 있다.
도쿄대 지능기계정보학과 타케우치 쇼지 교수는 "우리 몸은 유연하고 세밀한 움직임이 가능하며, 에너지를 효율적으로 변환할 수 있다"며 "이는 기계 부품을 조합해 만들어진 로봇에게는 아직 불가능한, 생물만이 가능한 이점"이라고 전했다.
이어 "생물의 특징을 기계와 융합한 바이오 하이브리드 로봇은 3D 프린터로 만들어진 조직과 생체 조직을 조합한 근구동형 로봇이 대표적"이라며 "지금까지 근구동형 로봇은 기어다니거나 물고기처럼 지느러미로 수영하는 동작 외에는 불가능했다"고 덧붙였다.
이 때문에 연구팀은 더 작은 각도로 선회하거나 움직이는 이족보행 로봇을 설계했다. 사람의 실제 보행을 모델로 삼고 진짜 근육을 기계와 결합해 기존 근구동형 로봇은 불가능했던 움직임을 만들어내려 했다.
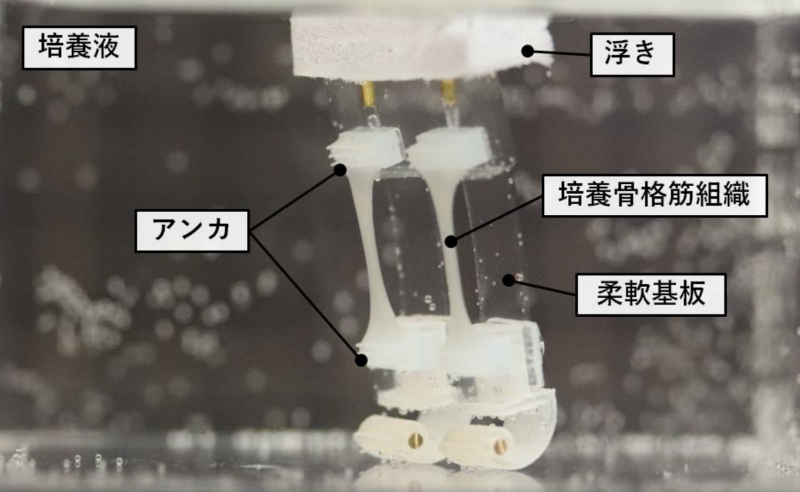
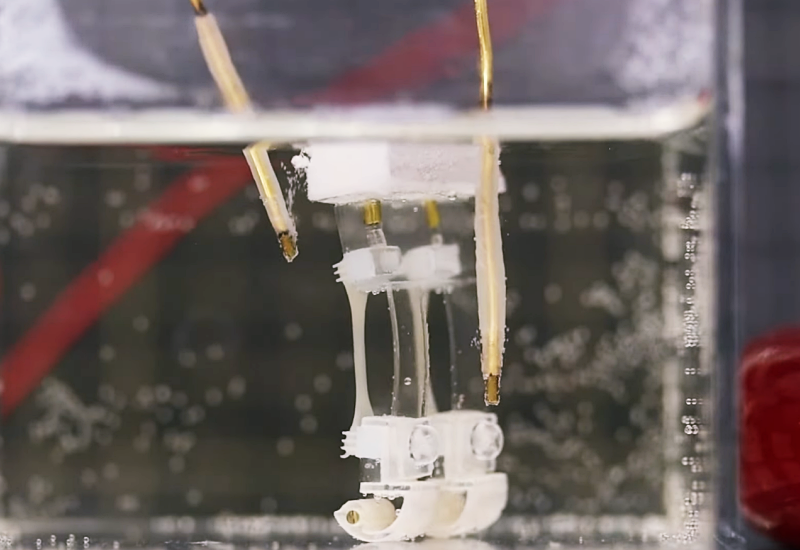
와세다대학교 공학자 모리모토 유야 준교수는 "우리가 구상한 로봇은 일단 배양액 안에서 가동하는 것을 전제로 한다"며 "딱딱한 로봇답지 않은 움직임을 위해 골격은 주로 실리콘으로 설계했다"고 말했다.
완성된 로봇은 근육에 전류를 흘리면 수축해 다리를 전방으로 들어 올리는 구조다. 배양액에 로봇을 세우기 위한 부유 장치를 맨 위에 장착했고 그 밑에 두 다리를 결합했다. 각 다리는 전류를 흘리면 들리고, 전류를 끊으면 뒤꿈치부터 착지한다.
모리모토 준교수는 "전류로 좌우 다리를 5초마다 자극하자 걷는 동작이 구현됐다"며 "속도는 아주 느리고 움직임도 크지 않지만 바이오 로봇으로서는 큰 걸음을 뗀 셈"이라고 의미를 부여했다.
그는 "실험에서는 62초 만에 90° 좌선회가 가능했다"며 "이런 선회각은 지금까지 등장한 근구동형 로봇은 생각조차 할 수 없었다"고 강조했다.
연구팀이 제작한 바이오 로봇은 근육 수축을 위해 일일이 한 쌍의 전극을 들고 수동으로 전류를 흘려야 한다. 연구팀은 향후 이 작업을 수행할 장치를 로봇에 내장할 예정이다. 아울러 관절이나 근육의 크기와 길이를 키워 훨씬 세련되고 역동적인 움직임을 구현할 계획이다.
타케우치 교수는 "로봇을 보강하기 전에 근육과 같은 생체 조직에 영양분을 공급하는 시스템을 고안해야 한다"며 "이것이 가능해지면 로봇이 배양액 없이 인간처럼 육상에서 움직이는 날이 올 것"이라고 기대했다.
정이안 기자 anglee@sputnik.kr