헬기처럼 호버링 방식으로 행성 표면을 탐사하는 로버가 실제 등장할지 관심이 집중됐다. 월면차처럼 행성이나 위성 표면에 바퀴를 대는 로버에 비해 안전성 문제에서 자유롭기 때문이다.
미국 매사추세츠공과대학교(MIT)가 최근 발표한 로버는 헬기가 제자리에서 부유하는 '호버링(hovering)' 상태로 자세를 유지할 수 있다. 달이나 소행성의 표면 탐사에 최적화된 이 로버는 프로펠러가 아닌 전하를 이용한다.
MIT 연구팀은 달처럼 대기가 아주 옅은 천체들은 표면이 태양에서 방사된 전하를 띤 입자, 즉 플라스마에 노출된다는 점에 주목했다. 정전기에 머리카락이 곤두서는 현상을 응용하면 로버를 달 표면에 충분히 띄울 수 있을 것으로 봤다.
플라스마를 응용한 부유식 로버는 미 항공우주국(NASA)도 주목해 왔다. NASA는 공기가 없는 천체의 표면 전하와 같은 양의 전하를 서로 대전하는 '마일러'라는 소재를 행성 탐사에 활용해 왔다.

다만 마일러는 달과 같이 소행성 이상의 크기나 중력을 가진 천체에서는 쓸 수 없다. 때문에 MIT는 소행성보다 큰 중력을 가진 천체에서 로버를 안정적으로 부유시킬 방법을 고민해 왔다.
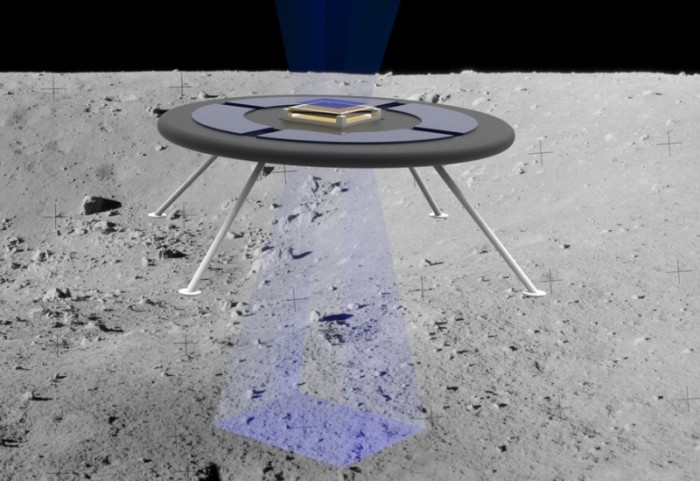
MIT가 개발 중인 로버는 초창기 SF영화 속 미확인비행물체(UFO)처럼 생겼다. 자체에서 이온빔을 쏴 로버 몸체를 대전시키거나 달 표면 전하를 강하게 만들어 로버와 달 사이에 척력(두 물체가 밀어내는 힘)을 만드는 구조다.
연구팀 관계자는 "수차례 시뮬레이션 결과 프시케 같은 소행성 표면에 900g가량의 물체를 1㎝ 이상 띄우기 위해서는 50kV의 이온빔을 81ms(밀리초) 조사해야 한다는 예측치가 나왔다"며 "소형 시제기를 활용한 실증 결과 실제 로버 제작도 가능하다는 결론에 도달했다"고 밝혔다.
MIT가 제작한 프로토타입은 이온 액체를 원료로 하는 추진기 5기를 탑재했다. 반지름 7.5㎝, 두께 약 3㎝의 어른 손바닥 크기로 무게는 60g이다. 일정한 전압을 가하면 전하를 띤 이온빔이 스프레이처럼 방출되는 구조다.
로버 시제기는 달이나 소행성 표면과 비슷한 환경으로 재현된 소형 챔버 실험에서 성능을 입증했다. 진공상태의 챔버 내부에서 로버 시제기를 스프링으로 매달아 이온빔을 쏠 때 척력을 측정한 결과, 시뮬레이션 상의 원반형 로버를 부유하는 데 필요한 힘의 양과 거의 맞아떨어졌다.
연구팀 관계자는 "로버를 행성 표면에 지속적으로 띄울 수 있다면 바퀴나 서스펜션 등 가동 부품에 대해 고민할 필요가 없어진다"고 의미를 부여했다. 이어 "소행성의 지표면은 우리가 미처 알지 못하는 굴곡 등 복병이 많다"며 "로버를 띄운 상태로 제어할 수 있다면 훨씬 효과적인 탐사가 가능할 것"이라고 기대했다.
정이안 기자 anglee@sputnik.kr